|
There is a need to boost the
software development to be able to deliver high quality
application code on time. Software development itself
becomes more complicated since a single processor system
will become rare in the future. Especially multi
processor systems require new development approaches.
Application development on a target board has advantages
and disadvantages. The major advantage is that the code
runs at the target speed. The disadvantages are not
neglectable, especially during the first phases of
product development. It is obvious that the target
hardware needs to be available for each software
engineer to allow short iteration cycles. A target can
be seen as a black box system which provides very
limited observability and controllability. By adding
costly HW recourses for verification purposes (break
units, trace buffers) this black box becomes at best a
gray box.
Evaluating
application code in a simulation environment where an
RTL simulator is also active is no solution. For a small
system an RTL simulation runs at a speed of
~200Hz. Assume the target
runs at 50MHz. This means the simulation environment
runs 250000 times slower. And software
engineers are not interested in waveforms but in
register views and in the current value of variables,
the frames on stack, etc.
A
well developed Instruction Set Simulators (ISS) runs at
a speed of several megahertz. When attention is paid to
the development of C++
peripheral models than it can
be statistically proved that they hardly influence the
simulation speed. Such a system is 10 times slower than
the target system, but fast enough to
boot a simulated OS and verify application code.
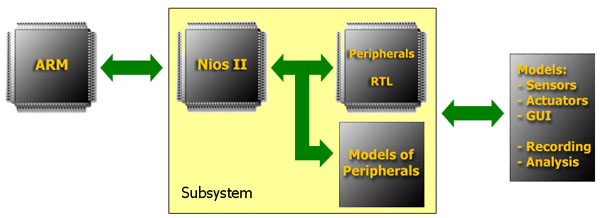
Univers fully supports the development and verification
of multi processor systems. For application code
development and verification Instruction Set Simulators
combined with C++ models of peripherals result in a high
speed virtual system. Such a system provides full
visibility and controllability to the development team.
C++ peripheral models can be added to model the outside world of
the system, such as sensors, actuators and visualization
of LCD output.
Univers includes a high speed digital simulator (VHDL
and Verilog) to support driver development and HDL
module design. For smaller, dedicated pieces of
software, the combination of a real ISS with the real
hardware design leads to early detection of interface
omissions.
Univers
benefits regarding system design:
 True multi core development and verification
(accurate) True multi core development and verification
(accurate)
Extremely good observability and controllability
High speed
Processor vendor and type independent
No need for costly target hardware
for each engineer
Software view of peripherals
Models may include
possible connections to the
outside world
|
